Общий 4-осевой контролер измерения зрения машины умный пакет
Введение
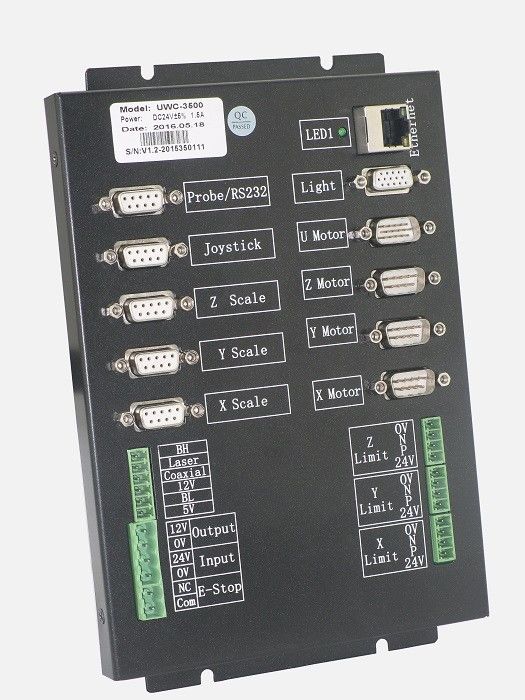
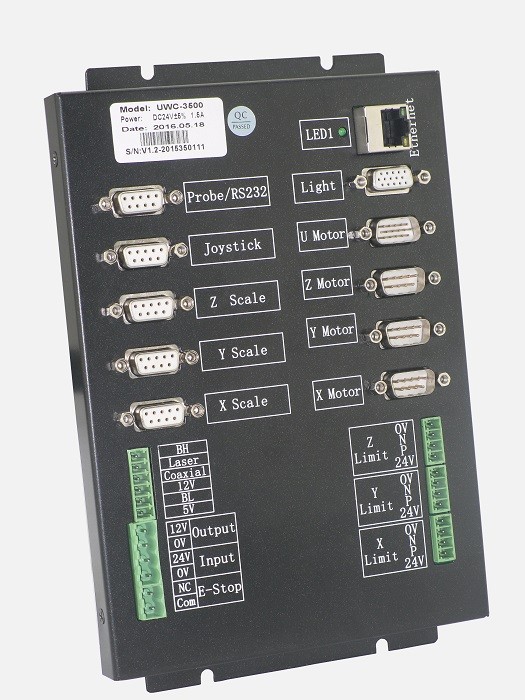
UWC 3500 - это общий 4-осевой полный контурный контроллер, используемый в машинах измерения зрения и композитных машинах измерения зрения или автоматических системах измерения.С линейной шкалой или кодером двигателя с обратной связью позиции в замкнутом цикле, UWC3500 может достичь высокой точности.
Особенности:
1Продвинутая верхняя и нижняя конструкция машины, высокопроизводительный процессор+FPGA
2Коммуникация: интерфейс Ethernet, время выполнения одной функции API ниже 0,45 мс.
3. режим управления направлением + импульсом, способный управлять ступенчатыми двигателями, серво AC, линейным серво или DDM и т. д.
4. Полное управление движением в замкнутом цикле, высокая точность определения местоположения, которая быстрая, точная и стабильная. Продвинутый алгоритм управления в замкнутом цикле и очень мало параметров PID обеспечивают удобство поворота для пользователей.
5. S тип кривой скорости планировки, отношение S секции в процессе замедления может быть установлено.
6Стратегия поиска:
Импульс + направление управления открытым циклом.
Линейное управление обратной связью по шкале/положению кодера, усовершенствованный алгоритм PID+VFF, устраняющий проблему с нулевым смещением.
7. Режим движения:
Точка-точка, режим JOG, режим самонаведения, который прост в использовании и гибкий, линейная интерполяция 2-осевой или 3-осевой, интерполяция горизонтальной дуги, сенсорный зонд и режим джойстика.
8Политика безопасности:
Функция автоматической регулировки вращения машины, автоматическое установление предельной логики и направления, параметров двигателя и направления линейной обратной связи,обеспечить устранение ошибки движения обратной связи.
Когда ось движется близко к предельной скорости, происходит ускорение вперед, а перед ориентацией происходит принудительное ограничение скорости движения.
Ограничение программного обеспечения поддерживается.
9. Функция API использует инкапсуляцию, обращенную к объекту, которая предлагает легкую программирование. Большинство параметров устанавливаются программным обеспечением для отладки.
10Высокая интеграция, высокая производительность, стабильное и простое производство и обслуживание.
11UWC-3500 использует технологию производства SMT, обеспечивает стабильность и надежность.
12. С высокой гибкостью UWC3500 подходит для нестандартного оборудования и также настраивать функцию доступна.
13. UWC3500 поддерживает функцию обновления онлайн-фирмвэра, пользователям не нужно удалять контроллер с машины, легко обновлять и расширять функцию,сократить цикл разработки и поворота оборудования;.
14Внешний модуль UWC348 IO, максимум 26 в 26.
15. Позиция сравнивания сравнивания функции, которая может быть точно сравнивается, также пользователи могут установить диапазон сравнивания триггера, вывод триггера может быть подключен к камере или лазерного датчика.
16Функция управления световым источником и функция сравнивания позиции CCD.
17Включается мощное программное обеспечение для отладки, простая работа, пользователям легко поворачивать машину.
Параметры
| Положение |
Минуточку.
|
Типичный
|
Макс. Макс.
|
Единица
|
| Время работы API |
0.425
|
0.43
|
0.45
|
мс
|
| Входное напряжение |
22.5
|
24
|
26
|
VDC
|
| Выходное вспомогательное напряжение 12 В |
11.76
|
12.05
|
12.24
|
VDC
|
| Выходной ток вспомогательной мощности 12 В |
0
|
2.0
|
2.5
|
А.
|
| Выходное напряжение мощности 5 В |
5.1
|
5.2
|
5.25
|
VDC
|
| Выходной ток 5 В |
0
|
1.8
|
2.0
|
А.
|
| Моторный интерфейс X/Y/Z способность к загрузке 24 В |
0
|
3.0
|
4.0
|
А.
|
| Частота импульса направления |
-
|
-
|
6.5
|
МГц
|
| Разрешение частоты |
0.006
|
-
|
-
|
Гц
|
| Диапазон подсчета по линейной шкале |
- 2147483648
|
-
|
2147483647
|
КНТ
|
| Диапазон отсчета импульса направления |
- 2147483648
|
-
|
2147483647
|
КНТ
|
| Уровень регулировки скорости |
-
|
-
|
1,000,000,000
|
32 бит DDS
|
| Поддерживается разрешение линейного масштаба |
-Нет.01
|
-
|
10000
|
Ну, да.
|
| Выходная частота сигнала линейного масштаба |
-
|
-
|
6.5
|
МГц
|
| Общий вход/выход контроллера |
-
|
-
|
-
|
Терминал
|
| Высокоскоростной интерфейс связи RS232 |
-
|
2
|
-
|
Терминал
|
| Внешний вход / выход (с использованием одного интерфейса связи RS232) |
-
|
24/24
|
-
|
Терминал
|
| Выходной ток шагового привода |
0.07
|
-
|
1.15
|
A ((RMS)
|
| Подразделение шагового привода |
16
|
16
|
16
|
|
Спецификация
| Нет, нет, нет. |
Спецификация
|
UWC3500
|
| 1 |
Поставка энергии
|
DC24V@2A вход, выход DC12V@2A ((поставка мощности CCD)
|
| 2 |
Измерение совместимости программного обеспечения
|
Полностью совместим с V1.4
|
| 3 |
Размер
|
255 * 118 * 53 мм)
|
| 4 |
Коммуникация
|
Изолированный USB или Ethernet (необязательно)
|
| 5 |
Политика контроля с закрытым контуром
|
PID+VFF+ мертвая полоса
|
| 6 |
Частота сервообновления
|
2.5 кГц
|
| 7 |
Противомеханический удар, оптимизация скорости
|
Мод SMART
|
|
| 8 |
Ось подсчета линейного преобразователя
|
3
|
|
| 9 |
Основная ось управления
|
4
|
|
| 10 |
Расходы по оси
|
Способность добавлять 3 оси импульс+направление
|
|
| 11 |
Режим управления по оси XYZ
|
Импульс + направление RS422
|
|
| 12 |
Тип двигателей, поддерживаемых осью XYZ (с внешним приводом двигателя)
|
Сервостепенное/переменное серво/линейное серво/серво постоянного тока с обратной связью кодера
|
|
| 13 |
Режим управления по оси U A
|
RS232 подключается к объективу автоматического зума Pomeas
|
|
| 14 |
Режим управления оси U B
|
Встроен 2-фазный ступенчатый драйвер, который поддерживает автоматический зум объектива с ступенчатыми двигателями, поддерживаются одиночные / двойные ограничения.
|
|
| 15 |
Планирование кривой скорости
|
Тип лестницы/S
|
|
| 16 |
Интерполяция
|
Многоосевая линейная интерполяция, 2-осевая интерполяция дуги, 3-осевая интерполяция
|
| 17 |
Максимальная частота пульса
|
5 МГц
|
|
| 18 |
Разрешение импульсной частоты
|
00,001 Гц
|
|
| 19 |
Уровень регулировки скорости
|
1,000,000,000
|
|
| 20 |
Аналоговое регулирование напряжения
|
-
|
|
| 21 |
Частота подсчета линейного преобразователя
|
6 МГц/ ((Фаза А или B)
|
|
| 22 |
Определение сигнала линейного преобразователя
|
R или S - необязательно (R:12345, S:26789)
|
|
| 23 |
Оборудование для измерения зонды
|
Схема интерфейса сенсорного зонда
|
|
| 24 |
Схема обработки ошибок зонды
|
Доступно, авто ремонт зонды nonhoming
|
|
| 25 |
Совместимый зонд
|
Ренишоу/Теса все серии спусковой сенсорный зонд
|
|
| 26 |
Модуль обработки зонды
|
Зонд высокоскоростной замок, джойстик управления точкой касания автоматической паузы и автоматического отступления, автоматический режим точек обнаружения
|
|
| 27 |
Встроенная карта сбора сигналов с помощью джойстика
|
12 битов разрешение, 0-5В аналоговый вход напряжения, 3 кнопки и 3 светодиода, включенный выключатель аварийной остановки, включая кнопку регулировки скорости (взаимно исключительно используется с кнопкой 3#)
|
|
| 28 |
Встроенная карта управления освещением
|
8 секций поверхностного света + нижнего света + коаксиального света, программное регулирование уровня 0-200
|
|
| 29 |
Функция настройки уровня освещения
|
16 уровней аппаратного регулирования в параметре настройки базы на требовании яркости
|
|
| 30 |
Возможность управления контурным светом / управление светодиодным банком
|
Макс. 420mA, подходит для большинства больших путевых машин
|
|
| 31 |
Внешний сложный тип интерфейса освещения
|
Способен подключать к 5 кольцам 8 секции одноцветного программируемого света, или 5 кольца 8 секции 4 цвета программируемого света, поднятого / вращающегося света
|
|
| 32 |
Общий интерфейс ввода/вывода
|
8 секций изолированного входа, 5 выхода (совместимый с ULN2803)
|
|
| 33 |
Системные часы
|
Год-месяц-день-час-минута-секунда, не может быть изменено
|
|
| 34 |
Обновление прошивки
|
Повышение качества обслуживания клиентов на месте, быстрое решение и техническое обновление.
|
|
| 35 |
Соединитель зонды
|
9-прицепный разъем D-DUB, более удобный для проводки и более стабильный
|
|
| 36 |
Коннектор джойстика
|
OTP6, OTP7, HC3 ((Джойстик с несколькими клавишами)
|
|
| 37 |
Обработка данных с помощью джойстика
|
Контроллер внутренне обрабатывает данные джойстика и управления движением, взаимный с другим режимом управления движением, джойстик зонд касается с автоматической остановки и автоматического отступления
|
|
| 38 |
Внешняя аварийная остановка
|
Кнопка экстренного остановки управляет питанием двигателя
|
|
| 39 |
Планирование кривой скорости
|
Лестница / тип S
|
|
| 40 |
Переменчик ограничения программного обеспечения
|
Доступно
|
|
| 41 |
Точка замедления программного обеспечения
|
Доступно
|
|
| 42 |
Назначенное расстояние торможения
|
Доступно
|
|
| 43 |
Поддерживаемое программное обеспечение для отладки
|
Версия V4.0 или выше (автоматическое обнаружение и настройка параметра)
|
|

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!